Design and Manufacturing of a Laboratory 3RRS Parallel Robot
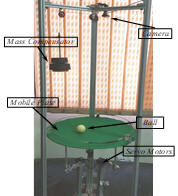
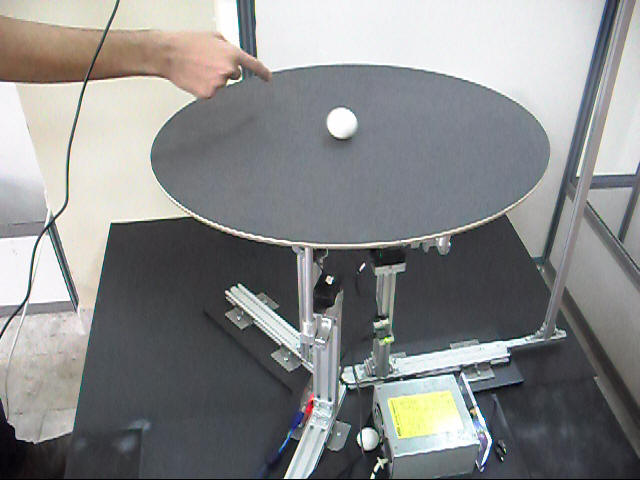
The system is a 3-RRS parallel manipulator as multivariable and nonlinear workbenches, which can be used to conduct researches to evaluate advanced control algorithms. The presented mechanism possesses 3 DOF, and the floating plate of this system has three independent motion, two rotational movements and a translation along the vertical axis. In order to reduce the required torques produced by servomotors, a mass compensator has been designed and exploited. The goal is to cause the ball follow a given path with properly controlled inputs.
.