Design and Manufacturing of a Continuum Robot
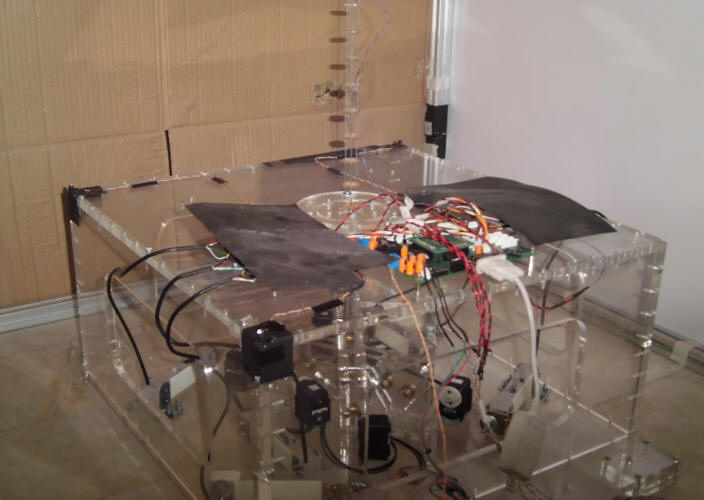
Continuum manipulators are defined as soft structures with infinite degrees of freedom. Among the several advantages of these manipulators, the most important ones can be mentioned as lower energy consumption, higher maneuverability, larger workspace and safer operation. To study continuum robotic arms, compact modeling approach, with limited computations for faster numerical calculations in real-time implementations was proposed. The time-taking boundary-value problem, and some numerical methods were introduced to solve the developed equations of modeling. Based on physical intuition, a fast and stable method was proposed to solve the boundary-value problem, as a moment-based approach. In this research, various control algorithms for multi-segment continuum robotic arms have been developed. Also, a two-segment robotic arm, which uses tendons for positioning the manipulator was designed and manufactured for experimental analysis, as shown below. The soft arm is being used to show the precision of proposed modeling approach, also to reveal the importance of faster solutions for various model-based real-time controllers. On the other hand, the arm is used to develop various identification approaches to model such highly nonlinear systems.
.