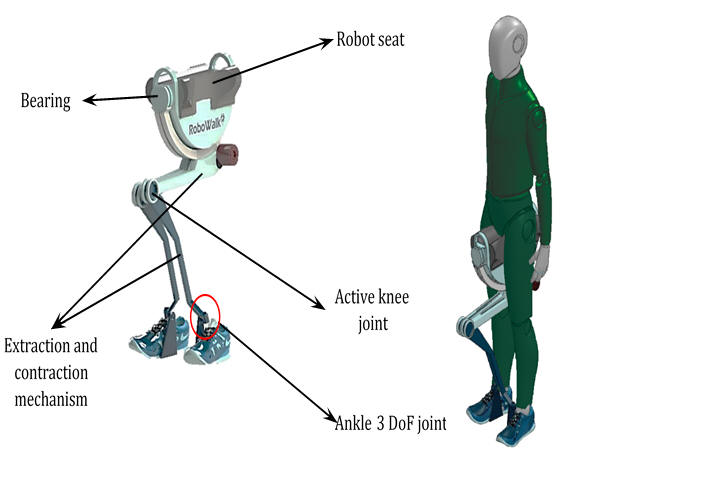
Design and Manufacturing of a Weight Assisting Rehabilitation Robot (RoboWalk)
Exoskeletons are used in different applications including the area of physical therapy in order to facilitate the patient’s exercises and as an assisting technology to assist the elderly carry out their ordinary activities as RoboWalk is supposed to do. Before constructing the system, the dynamics of the human and RoboWalk has been obtained using the Newton-Euler (NE) and the Recursive Newton Euler Algorithm (RNEA). The human model is a simplified version of a human model with 37 degrees of freedom and muscle actuated lower limb. The obtained models are then augmented to estimate the RoboWalk joint forces and torques, and to design the controller. The system is to be completed for experimental studies.