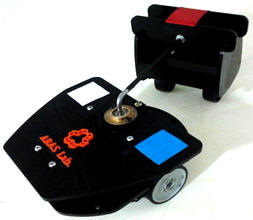
Design and Manufacturing of a Tractor-Trailer Wheeled Robot
A Tractor-Trailer Wheeled Robot is a highly nonlinear systems, that its mobility is restricted due to the presence of nonholonomic constraints of wheels, also the system severe underactuated nature. These conditions generate major difficulties in system stabilization, i.e. to park or reach a given configuration for the overall system. This leads to a challenging control problem that is the focus of this research, to develop various control algorithms for real time implementation. The system is a differentially driven wheeled robot towing a passive trailer. Tractor has two actuated wheels that are used in order to produce a controlled desired motion in Cartesian space. Also a spherical passive wheel is used in tractor structure in order to maintain stability. Also, trailer has two coaxial passive wheels. The connection between trailer and tractor is via a passive pin. So far, various control algorithms were developed, and experimentally verified in real time implementation on the system.