اکتشاف فضایی
چاپ سهبعدی زیستگاه مریخی
محدودیتهای مأموریتهای سرنشیندار شامل محدودیت در مقدار محموله قابل انتقال به جسم هدف و آسیبپذیری انسان در برابر فشارهای شدید، دماهای نامساعد و تشعشعات فضایی است. بنابراین ترجیح بر این است که محل فرود احتمالی انسانها پیش از رسیدنشان دارای یک زیستگاه ساختهشده باشد که ترجیحاً از مواد موجود در محل (in-situ) ساخته شده باشد. این بدان معناست که چشمانداز استفاده از یک ماده مریخی به راحتی در دسترس، مانند سنگپوش (regolith)، در یک روش تولید به راحتی برنامهپذیر، مانند چاپ سهبعدی، بسیار جذاب است. هدف این پروژه، بررسی و توسعه یک مخلوط حاوی سنگپوش مریخی برای مقاصد چاپ سهبعدی در شرایط نامساعد است
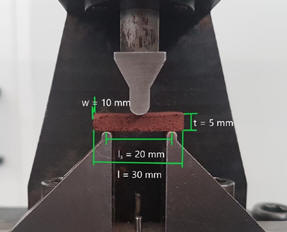
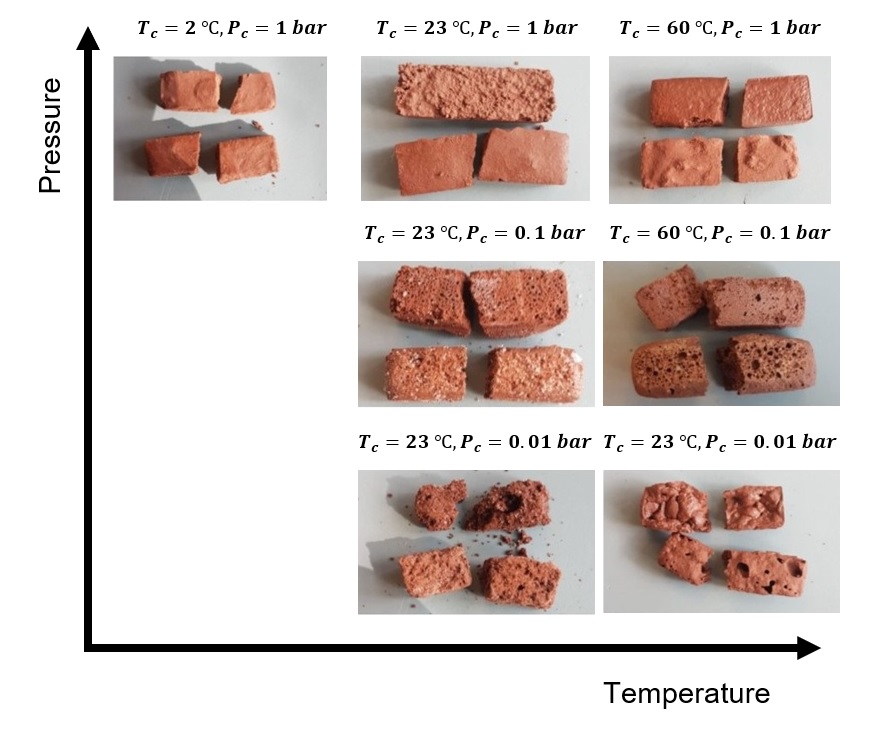
سنگپوش (Regolith) دارای ویژگیهایی است که در حضور چسباننده قلیایی مناسب، به آن اجازه میدهد به عنوان یک ژئوپلیمر عمل کند و به طور فرضی، مقدار بسیار کمی از چنین چسبانندهای مورد نیاز است. برای این پروژه، از یک چسباننده سادهشده متشکل از آب و سیلیکات سدیم استفاده شده است. شرایط مریخ به دلیل دمای پایین و فشار کم روی سطح سیاره، برای پخت چنین مخلوطی کمتر مساعد است. همچنین، تولید از طریق چاپ سهبعدی در مقایسه با قالبگیری ممکن است تأثیری بر خواص مکانیکی نهایی داشته باشد. برای ارزیابی خواص مکانیکی مخلوط، قرار بود قالبگیری نمونهها و چاپ سهبعدی در شرایط پخت مختلف انجام شود و خواص نمونههای حاصل با یکدیگر مقایسه شوند.

سنگپوش شبیهساز مریخ
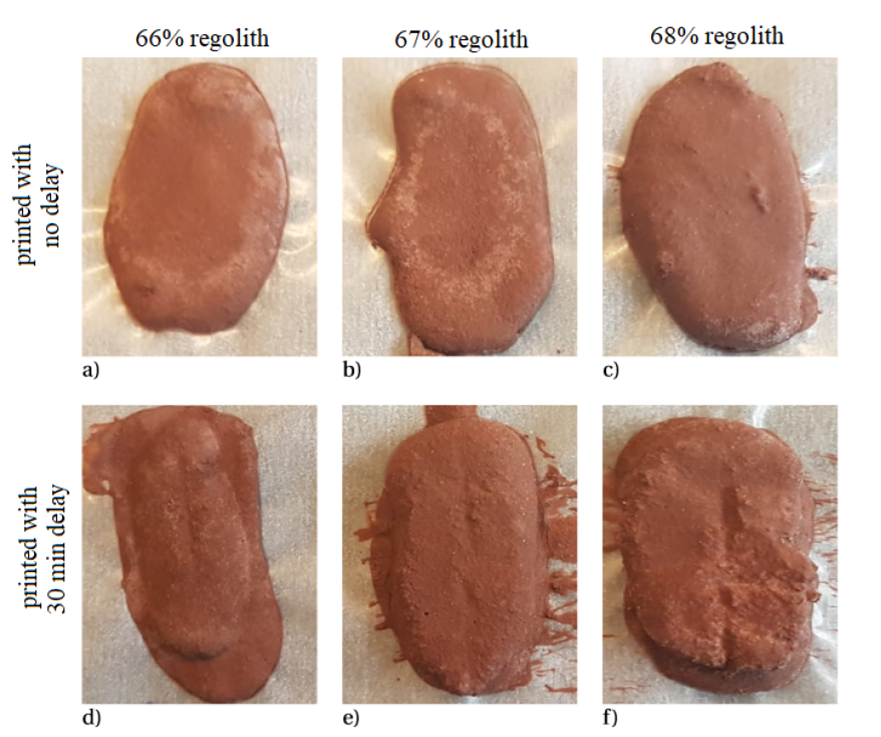
نمونههای چاپ سهبعدیشده با ترکیبات مختلف و با/بدون تأخیر
Understanding the Radiation Risk of Human Interplanetary Travels (ARCHER)
هدف اصلی پروژه ARCHER ارائه یک طراحی کیوبست (CubeSat) از نظر اقتصادی و فنی امکانپذیر بود که قادر به انجام واقعبینانه مأموریت و مشخصهیابی محیط تشعشعات بینسیارهای باشد. تیم تحقیقاتی با تمرکز ویژه بر امکانسنجی طراحی، برنامههای محاسباتی متعددی را توسعه دادند که شامل ترسیم مسیرهای ماهوارهای، محاسبه نرخ تخریب باتریها، برآورد توان متوسط تولیدی سلولهای خورشیدی، بهینهسازی سیستمهای گرماخور، محاسبه تکانه زاویهای و تحلیل بودجه لینک ارتباطی میشد. برای تضمین دقت نتایج و ارزیابی جامع طراحی، از نرمافزارهای استاندارد صنعتی شامل STK، ANSYS، CATIA و SPENVIS بهره گرفته شد. این پروژه تا مرحله طراحی واسطهای ارتباطی بین زیرسیستمهای مختلف، شامل زیرسیستمهای قدرت و انتقال داده پیشرفت کرد که نشاندهنده سطح عمیق تحلیلهای انجامشده است
علاوه بر این، دو مرحله طراحی انجام شد: یک مرحله برای پروفایل مأموریت و دیگری برای طراحی سیستم. در طول هر دو مرحله، مهندسی سیستمها و مدیریت پروژه به صورت عمیق در تمام فعالیتها ادغام شده بود. این رویکرد به تعیین مهلتها، پایبندی به زمانبندیها، هدایت فرآیندهای تصمیمگیری و اطمینان از رعایت استانداردهای سختگیرانه و سطح بالا در مهندسی پروژه کمک کرد. ابزارهای مهندسی سیستمها صرفاً به عنوان تحویلدادنیها در نظر گرفته نشدند، بلکه به صورت فعال برای مهندسی زیرسیستمها، انتخاب اجزاء و ردیابی تغییرات مورد استفاده قرار گرفتند. همچنین، طراحی همزمان به منظور تسریع در تکرار مراحل اولیه طراحی سیستم پیادهسازی شد.
برای بهرهگیری از دانش و تجربیات متخصصان، مشاورههای گستردهای با کارشناسان مختلف انجام شد. این مشاورهها شامل متخصصان آژانس فضایی اروپا، شرکتهای فعال در فناوری کیوبست، کارشناسان افزونگی و قابلیت اطمینان و همچنین متخصصان اجزاء بود که نظراتشان بهصورت مؤثری در طراحی ادغام شد. تمامی راهکارهای ممکن برای ارتقای طراحی و تحقق هدف تیم - که طراحی سیستمی با قابلیت پیادهسازی واقعی بود - با دقت بررسی و پیگیری شد
نکته حائز اهمیت این است که تیم در طول این پروژه با همکاری و تلاش مستمر پیش رفت. دانش ارزشمندی کسب شد و اشتیاقی واقعی نسبت به پروژه شکل گرفت. ARCHER مأموریتی است که تیم با افتخار از آن حمایت میکند و با غرور آن را ارائه میدهد.

Returning to Saturn - Characterizing the Icy Moons and Rings (EPOSS)
مأموریت EPOSS برای پرتاب توسط فالکون هوی طراحی شده است و هشت ابزار علمی را حمل میکند که برای برآورده کردن نیازهای علمی تعیینشده توسط تیم انتخاب شدهاند. پرتاب این مأموریت برای ۱۹ آوریل ۲۰۲۸ (۳۰ فروردین ۱۴۰۷) از پایگاه هوایی وندنبرگ برنامهریزی شده است. با ΔV بینسیارهای ۱۳۳۰ متر بر ثانیه، فضاپیما یک پرواز نزدیک از زهره و دو پرواز نزدیک از زمین انجام خواهد داد تا به زحل برسد، جایی که مدار خود را بین حلقههای F و G زحل قرار خواهد داد. پرواز نزدیک از زهره این امکان منحصر به فرد را فراهم میکند تا این سیاره مورد بررسی قرار گیرد و علوم ثانویه برای ذینفعان علاقهمند انجام شود. در طول این پرواز نزدیک، از محمولههای MERMAG (بررسی بادهای خورشیدی و ساختار طنابهای مغناطیسی) و VIMS (بررسی فرآیندهای ابری و توزیع ترکیبات جو زهره) استفاده خواهد شد. فضاپیما پس از ۹.۸ سال سفر بینسیارهای، در فوریه ۲۰۳۸ (بهمن ۱۴۱۶) به مدار زحل خواهد رسید. در این مأموریت، چهار پرواز نزدیک از انسلادوس (قمر زحل) انجام خواهد شد که در آن ابزارهای علمی برای بررسی ذرات فورانهای یخی، تحلیل ژئوفیزیکی، سنجش از دور و بررسیهای در محل این قمر به کار گرفته خواهند شد
چهار پرواز نزدیک از دافنیس نیز اندازهگیریهای علمی مشابهی انجام خواهند داد، در حالی که تور قمری برای دستیابی به اهداف از پیش تعیینشده، فرصتی برای گسترش دانش موجود درباره سایر قمرهای منظومه زحل فراهم میآورد. در این میان، از ابزارهای MERMAG و MORE برای بررسی میدان مغناطیسی و گرانشی زحل استفاده خواهد شد. ابزار JANUS مسئول تصویربرداری از قمرها خواهد بود، در حالی که VIMS به تجزیه و تحلیل ترکیبات سطحی آنها میپردازد. در مرحله نهایی، از BELA و REASON برای مطالعه ریختشناسی و شناسایی ویژگیهای هسته استفاده میشود و ENIJA همراه با INMS به بررسی ذرات موجود در اطراف و بین قمرها خواهند پرداخت. پایان برنامه مأموریت با مصرف ΔV معادل ۲۳۱ متر بر ثانیه و برخورد عمدی فضاپیما با قمر تتیس در فوریه ۲۰۴۴ (بهمن ۱۴۲۲) محقق خواهد شد، مگر آنکه با توجه به پیشران باقیمانده، امکان تمدید مأموریت وجود داشته باشد. همچنین طراحی فضاپیما این قابلیت را داراست که با اختصاص ۲۳۰ کیلوگرم از ظرفیت باقیمانده (بدون تجاوز از حداکثر ظرفیت پرتابگر)، میزبان محمولههای ثانویه پیشنهادی ذینفعان خارجی برای انجام تحقیقات تکمیلی باشد.
طراحی فضاپیما به صورت بخشبندی شده آغاز شد که در ابتدا مسیر پرواز و محمولههای علمی لازم برای دستیابی به اهداف مأموریت به تفصیل مشخص گردید. پس از تکمیل این مرحله، هفت زیرسیستم دیگر تقریباً به صورت همزمان طراحی و اندازهگیری شدند. طراحی فعلی امکان انجام تمامی نیازمندیهای علمی اولیه را در مدت ۴۵۷ روز انسلادوسی (مدت زمان گردش به دور انسلادوس) همراه با چهار پرواز نزدیک از انسلادوس و چهار پرواز نزدیک از دافنیس فراهم میآورد. سیستم کنترل وضعیت (ADCS) قابلیت پایدارسازی سهمحوره را با استفاده از سه ستارهیاب، سه خورشیدیاب، دو واحد اندازهگیری اینرسیایی، چهار چرخ عکسالعملی و شانزده پیشرانهکننده کنترل وضعیت دارا میباشد که همگی با در نظر گرفتن افزونگی سیستم طراحی شدهاند. سیستم پیشرانش از یک موتور اصلی دوگانه و سیستم کنترل وضعیت تکپیشرانهای تشکیل شده است. وظایف مخابراتی و کنترل از راه دور (TT&C) از طریق یک آنتن با گین بالا در باند Ka و دو آنتن با گین پایین در باند X با مدولاسیون BPSK و کدینگ توربو انجام میشود. سیستم کنترل و مدیریت داده (C&DH) شامل یک کامپیوتر رویبرد Airbus OSCAR، یک ضبطکننده حالت جامد NEMO به همراه کابلها و سیمکشی مرتبط میباشد. منبع تغذیه اصلی فضاپیما متشکل از نه ژنراتور ترموالکتریک رادیوایزوتوپی مبتنی بر آمریسیم است که توسط دو باتری لیتیوم-یونی پشتیبانی میشود. کنترل حرارتی شامل دمپرهای حرارتی، تابشگرها، عایقهای چندلایه و پوششهای ویژه به عنوان کنترلکنندههای خارجی دما بوده و کنترل دمای داخلی توسط ژنراتورهای رادیوایزوتوپی و سیستم حلقه مویرگی پمپاژ انجام میپذیرد. ساختار اصلی فضاپیما از جنس آلومینیوم 7075-T6 به صورت نیمهپوسته استوانهای تقویتشده طراحی شده که شامل یک محافظ برای جلوگیری از تشعشعات ژنراتورها به همراه تقویتکنندهها و تیرکهای حمایتی میباشد. مکانیزمهای مورد نیاز برای استقرار رادار، بوم مغناطیسسنج و تنظیم جهت آنتن نیز در طراحی گنجانده شدهاند.
هزینه این مأموریت بالغ بر ۱.۴۳ میلیارد یورو خواهد بود که کلیه عملیات را شامل شده و با در نظر گرفتن جرم خشک ۱۲۲۹.۹ کیلوگرم و جرم تر ۴۲۸۸.۲ کیلوگرم محاسبه شده است. فضاپیمای EPOSS با بهرهگیری از ۹ ژنراتور ترموالکتریک رادیوایزوتوپ (RTG) مبتنی بر آمریسیم به عنوان منبع اصلی و ۲ باتری لیتیوم-یونی به عنوان منبع پشتیبان، ۳۵۱.۷ وات توان نامی مصرف میکند. در فرآیند طراحی فضاپیما، تحلیل ریسک جامعی به منظور تضمین قابلیت اطمینان سیستم و کاهش خطاهای ناشی از خرابیهای احتمالی انجام پذیرفت. از جمله ریسکهای حیاتی که میتوانست منجر به شکست مأموریت گردد، میتوان به قطع ارتباط سیگنال اشاره کرد که با پیادهسازی راهکارهای افزونگی در طراحی سیستمهای ارتباطی مهار شده است. همچنین خرابیهای سیستم پیشرانش نظیر نقص عملکرد شیرها یا موتور اصلی نیز از طریق طراحی افزونه تحت کنترل درآمدهاند. تیم طراحی با به کارگیری روشهای تأیید و اعتبارسنجی ساختاریافته - شامل ارزیابی روشهای طراحی هر زیرسیستم و آزمونهای سختافزاری قطعات تولیدی - اطمینان حاصل نموده که مأموریت قادر به تحقق کلیه الزامات تعریفشده در مرحله آغازین طراحی خواهد بود. این رویکرد سیستماتیک، امکان پایش مستمر کیفیت و عملکرد را در تمامی مراحل توسعه فراهم آورده است.
